章节
基于离子型电致动聚合物柔性仿生机器人
摘要
柔性智能材料因其独特的性能以及对传统机械驱动方式的革新,成为科学界的研究热点。离子型电致动聚合物是以离子迁移实现能量转换的柔性智能材料,其驱动电压低(小于10V)、变形大、响应快、柔性好、能耗低且不易疲劳,在柔性机器人领域展现可观的应用前景。本项目以离子型聚合物金属复合材料(IPMC)作为驱动器,融合不同的结构功能,以科普工作为重心,设计出适用于海、陆、空的三种柔性仿生机器人。以柔性机器人作为载体,突出介绍材料的性能特点、变形机理和应用前景,深入浅出地向青少年科普研究材料。本项目旨在促进青少年对该材料的认识,增加青少年对该材料的兴趣,达到推广和发展研究材料的目的。
关键词
作者
检索正文关键字
章节目录
-
一 项目概述
- (一)项目背景
- (二)研究过程
- 二 研究内容
-
三 研究成果
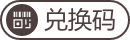
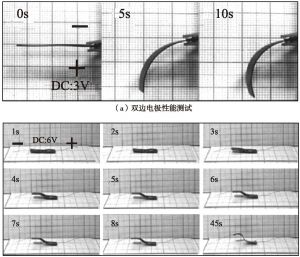
- (一)IPMC材料
- (二)材料展示箱
- (三)柔性仿生机器人样机
- 1.仿蠕虫机器人
- 2.仿蝴蝶机器人
- 3.仿生鱼机器人
-
四 总结与思考
- (一)创新点
- (二)应用价值
- (三)未来发展
章节图片/图表
相关文献
查看更多>>>