章节
驾驶场景虚拟仿真技术
关键词
作者
中国汽车技术研究中心有限公司数据资源中心 中国汽车技术研究中心有限公司,数据资源中心中国汽车技术研究中心有限公司数据资源中心作为中国汽车行业最重要的数据资源整合及服务机构,在工业和信息化部、商务部、财政部、国家税务总局的领导和支持下,积极推进信息化与工业化融合,以综合解决方案为主要手段,促进汽车行业的可持续发展,建立了基于大数据、大平台、大计算三大发展领域的多维度业务框架。为行业、企业提供一站式解决方案,助力企业、行业发展,致力于成为国家级汽车行业数据中心。
检索正文关键字
章节目录
- 第一节 驾驶场景虚拟仿真概论
- 第二节 仿真测试系统组成
- 第三节 国内外仿真测试现状
-
第四节 虚拟仿真技术
- 一 仿真平台
- 二 仿真数据体系
- 1.场景来源划分
- 2.自然驾驶仿真场景
- 3.危险工况仿真场景
- 4.标准法规仿真场景
- 5.参数重组仿真场景
- 三 虚拟试验场建设
- 2.静动态组合场景
- 第五节 评价体系
-
第六节 虚拟仿真测试工具链
- 一 虚拟仿真测试工具链体系介绍
- 二 测试工具链
- 1.MIL/SIL测试工具链
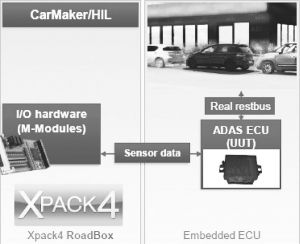
- 2.HIL测试工具链
- 3.DIL测试工具链
- 4.VIL测试工具链
- 三 虚拟仿真软件及应用
- 四 自动化测试软件及应用
-
第七节 智能网联汽车仿真验证与评价
- 一 L2及以下级别自动驾驶仿真验证与评价
- 1.先进驾驶辅助系统介绍
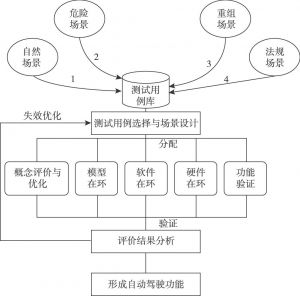
- 2.仿真验证与评价整体框架
- 3.仿真测试用例设计
- 4.仿真测试的评价指标
- 5.虚拟仿真测试评价流程
- 二 L3级别自动驾驶仿真验证与评价
- 1.面临的挑战
- 2.仿真验证与评价流程
- 3.测试理念与通过标准
- 一 L2及以下级别自动驾驶仿真验证与评价
章节图片/图表


















































查看更多>>>