报告
车辆决策与控制技术动态与发展
检索正文关键字
报告目录
-
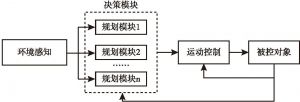
一 自动驾驶车辆系统体系架构
- (一)分层递阶式架构
- (二)反应式架构
- (三)混合式架构
-
二 车辆路径规划技术
- (一)路网文件
- (二)路径规划算法
-
三 车辆行为决策技术
- (一)有限状态机模型
- (二)层次状态机模型
- (三)基于多准则的决策方法
- (四)基于模糊决策的行为决策方法
-
四 车辆轨迹规划技术
- (一)图搜索算法
- (二)增量搜索法
- (三)曲线拟合法
- (四)基于优化的方法
-
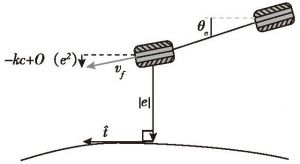
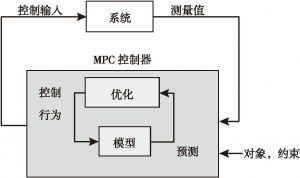
五 车辆控制
- (一)车辆模型
- (二)车辆控制技术
报告图片/图表














相关文献
查看更多>>>