章节
面向5G远程自动驾驶的CPSS控制系统研究
摘要
自动驾驶技术在提升道路安全、提高通行效率和降低能耗等方面有着巨大发展潜力。国内外有不少专家和学者提出了多种自动驾驶系统解决方案,但大部分都还处于宏观系统研究层面,缺少结合具体应用场景的系统化技术解决方案。本文从信息物理社会(CPSS)系统视角,结合5G通信、远程遥控驾驶、网联自动驾驶等应用技术,提出一种结合新型5G通信网络的自动驾驶系统架构。基于该自动驾驶车辆系统解决方案,试验将一款具备线控底盘的车辆改造成了自动驾驶车,并搭建了自动驾驶车辆运行环境,开展了通信时延、主动安全性能和自动驾驶控制性能。结果表明:从CPSS视角提出的5G远程自动驾驶系统解决方案,可实现自动驾驶车辆安全、有效控制,具备商业化推广的技术可行性。
检索正文关键字
章节目录
- 一 前言
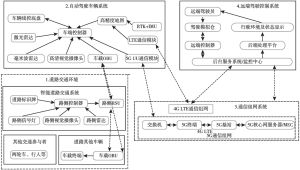
- 二 5G远程自动驾驶系统架构
- 三 5G远程自动驾驶系统架构设计
-
四 车辆感知及控制系统设计
- (一)基于多源数据融合技术的感知系统研究
- (二)5G远程驾驶控制系统策略研究
-
五 试验结果与分析
- (一)通信延时性能测试
- (二)自动驾驶车辆主动安全性能验证
- 1.目标车停止场景测试
- 2.静止目标车避撞场景测试
- 3.低速目标车避撞场景测试
- 4.行人目标横穿避撞场景测试
- (三)自动驾驶车辆目标轨迹跟踪行驶
- 六 结束语
章节图片/图表















相关文献
查看更多>>>